Interrupts
This
section describes the interrupt routines used in BRTOS to support
the serial communications and keypad.
If you
are going to use interrupts it worth while considering all aspects of your
system to see which functions could benefit from using this technique. (Once you have grasped the nettle adding
additional interrupt functions is not that difficult). Interrupts
have been used in four situations in BRTOS:
- Timeout counter
- 500mSecond Timing Tick
- USART Transmit and Receive
- User Input
Lets
look first at the elements of interrupt processing?
1 Initiating
the hardware
2
Turning
the Interrupt on
3
Saving
the current state of the program (Context Save)
4
Passing
control to the Interrupt Handler
5
Processing
the interrupt (Interrupt Service Routine)
6
Restoring
the previous program state (Context Restore)
BRTOS
uses a general purpose Interrupt Handler which covers all items in the above
list with the exception of item 5 Processing the Interrupt and provides
recognition and routing of most of the interrupt sources provided on the 18F
range of processors. It is written
virtually entirely in assembler, partly for historical reasons but mostly to
make it possible to use the assemblers conditional directives.
First a diversion on Assembler Directives MPASM supports Directives these are commands to instruct the
assembler on certain actions to take during assembly. There are some 58 directives which can be
used; however I will only cover an explanation of those used in BRTOS. For those interested in investigating these
further look at the MPASM Assembler help file available from Microchip
All assembler directives
must begin with a # character
#DEFINE <Name> <String>
will substitute <String> whenever <Name> occurs in the code. This is used
in the interrupt control routines to associate Interrupts with specific
Interrupt Service Routines.
The presence of
Define statements can be tested using
#IFDEF <Name> will return true if Name has been #DEFINE(D)
Conversely
#IFNDEF <Name> will return true if Name has not been #DEFINE(D)
These work in the
normal way with #ELSE and #ENDIF
Warning - Be careful in the way you use
these directives, as the compiler does not recognise them it will attempt to
compile all the code regardless of the directives. Only at assembly time will the unwanted code
be dropped. This means that you cannot
use labels within an #IF conditional unless that label exists even if you dont
intend to use it in the current build.
Again, since, the
compiler is unaware of any of these conditionals, you cannot use the string
substitution at the Basic level you can only use it inside assembler.
Interrupt Handler
Despite
the length of this code the Interrupt Handler is really quite simple. You set up the labels of the Interrupt
Service Routine (ISR) you want to run against each interrupt and the program
will jump to that label whenever the interrupt occurs.
At the
start of your main application you need to place a #DEFINE statement for each
interrupt you will be using in the form #DEFINE Peripheral_Name ISR_Label.
E.g. #DEFINE RX_HANDLER ReceiveUSART
will tell
the Interrupt handler that you want the USART, when it receives a character, to
raise an Interrupt and jump to the routine ReceiveUSART.
Peripherals
which are not given a handler reference will not be included in the interrupt
routine. These defines must appear ahead
of the Interrupt Handler. Similarly the
Interrupt Service Routines should come after the Interrupt Handler.
The full
code is in Int_Ctrl_P+.inc.
Interrupt_Init: This section must be called
from the main application during program initialisation. After making sure
interrupts are off and that Priority interrupts are not enabled it will run
through any peripheral set up code required.
If you havent #DEFINE(d) an ISR to the Peripheral the assembler will
simply ignore that bit of setup code.
The actual set up will depend on the type of peripheral and the state
each peripheral is left in is shown in the table below.
|
TMR1_HANDLER
|
- Sets the TMR1 to use the
internal clock at a default frequency of 100Hz unless TMR1_FREQ is
defined.
- Allowable Frequency range is
16Hz to 10KHz.
- Timer will be left running with
interrupt enabled
- Adds in code to reload TMR1 and
vectors to TMR1 ISR
|
|
RX_HANDLER
|
- Enables interrupt of USART
Receive
- Adds in code to vector to the
USART_ RX ISR
|
|
TX_HANDLER
|
- Clears the TX Interrupt flag
Leaves Interrupt Disabled
- Adds in code to vector to the
USART_TX ISR
|
|
MSSP_HANDLER
|
- Adds in code to vector to the
MSSP ISR
|
|
AD_HANDLER
|
- Adds in code to vector to the AD
ISR
|
|
LVD_HANDLER
|
- Enables the Low Voltage Handler
to trigger at 4.2 Volts
- Adds in code to Vector to the
LVD ISR
|
|
IOC_HANDLER
|
- Enables Interrupt on Change
- Adds in code to vector to the
IOC_ISR
|
|
INT0_HANDLER
|
- Sets to Edge triggering and
enables Interrupt
|
Interrupt Priority has been deliberately disabled as there is no facility in Proton to
support a second level of context saving.
If you want to use both levels you will have to handle all Context
Saving in code.
Interrupt Service Routines (ISRs)
The Interrupt
Handler will Jump to the ISR in
question which will carry out the necessary actions in response to the
interrupt before Jumping back to the
Interrupt Handler.
The
Interrupt Service Routines must also clear the associated Interrupt flag if the
hardware does not do this automatically.
You will need to read the Microchip datasheets to find out what flags
are automatically reset.
To reiterate an
earlier point
- It is essential to minimise the time
spent in the ISR responding to the Interrupt.
As a general guide, an Interrupt subroutine should simply note the fact
that an event has taken place, move any data associated with the event into or
out of storage and return. If there is
processing to be done as a result of the event this should be carried out
outside the interrupt subroutine.
All ISRs
must return to the Interrupt Handler with a Goto Int_Code_Cont.
This ensures the any interrupts that occurred while we were in the ISR
are properly handled by the Interrupt Handler.
That concludes
the overview of the interrupt handler and ISRs, the next sections, by way of
example, describe how the specific USART receive and transmit ISR are
implemented.
TX/RX Interrupt Service Routines
BRTOS
provides a FIFO buffer for both transmit and receive operations of the
USART. The Receive FIFO is loaded on
interrupt from the Receive USART channel and the Transmit FIFO is unloaded on
interrupt from the Transmit USART channel.
This has
the advantage that the application code does not need to wait on receiving
characters from the USART. Similarly on
the transmit side the application code only has to load an array and leave the
transmission to proceed under interrupt control.
As BRTOS
is a task scheduler the routines also provide the option of adding a routine to
the Immediate task list when the receive buffer contains a defined number of
characters.
The code
for the TX/RX Drivers is in RX_BUFF_P+.inc
TransmitUSART is triggered whenever the USART
TXREG becomes empty. The routine simply
loads the next entry in the FIFO into TXREG, repositions the pointer to the
next entry in the FIFO and decrements the FIFO length. If the FIFO is empty the TX interrupt is
disabled and if the directive #DEFINE
PUT_TX_RECORD is
added the routine will add the Put_Record routine onto the immediate task list.
ReceiveUSART is triggered whenever the USART
RCREG has been loaded with a character.
The routine checks and clears any overrun error sets the Overrun flag,
records the framing error bit and loads the character held in RCREG into the
head of the receive FIFO providing there is room. It adjusts the pointer to the head of the
FIFO and increases the length of the FIFO by one.
The Timer
RxTMR is reset to its timeout
value and commences to count down. This
is used to prevent the receive interface hanging if it does not receive a
complete record.
Finally,
if the directive #DEFINE GET_RX_RECORD is added, the routine checks the
length of the received data and if it has reached a defined length
(RB_MinMsgLen) it will place the Get_Record routine on the immediate task
list. When the program returns to the
scheduler this routine will look for a data record and process it. I will describe this record handling in a later
article.
Loading and Unloading the FIFOs
Having
described how the hardware interfaces to the FIFOs I will describe the
functions to load and read from the FIFOs.
RB_GetChar Data in the receive FIFO can be
access through RB_GetChar. This removes
the data from head of the FIFO and reduces the FIFO by one character. The data is returned in TXChar.
RB_GetFirstChar and RB_GetLastChar These two routines return the character in the
respective locations but do not unload them from the FIFO. These can be used by the Get_Record routines
to test if a record is present before unloading.
RB_GetHex2 and RB_GetHex4 These two routines will return a HEX byte or HEX Word
in RXByte and RXWord respectively
Note - the following 2 functions are called as macros - the square brackets are optional and are retained for consistency with Proton's natural syntax.
HSerOutI [Array] will load the TX FIFO with the data held in Array and enable
the TX Interrupt.
HSerOutI [Byte] will load the TX FIFO with a single byte and enable the TX Interrupt.
Keypad Interrupt Service Routines
The Menu
article in Part 3 skipped the scanning the keys until we had covered the
handling of interrupts, so now it is time to explain the two Interrupt Service Routines
used in scanning the keypad.
You may
recall that I mentioned earlier that I have used TMR1 for de-bounce and key
repeat timing. This timer is set to
interrupt every 20mSecond and can provide a useful timing source when short
term timing is required.
KeyScan_Intr is triggered whenever a key in
first pressed. It simply records the
fact that a certain key has been pressed and saves it in the variable
Keys. Importantly, it also disables
further Interrupt On Change interrupts and sets the KeyRepCtr to 1.
KeyRepTMR is triggered every 20mSeconds
by TMR1. Basically, it checks to see if the Keys value saved by KeyScanIntr is
the same as the current Keypad value. If
it is it decrements the KeyRepCtr otherwise it will re-enable Interrupt On
Change.
If the
counter has reached zero it will add the ProcessButtons task onto the immediate
Task list so that it will be executed shortly after the return from interrupt
and will load the counter with the RepeatRate value. As long as the button remains pressed the
Processes buttons will be called at the RepeatRate, once the button is released
the program will detect key presses through the PICs interrupt on change.
This is a
very neat way of providing both de-bounce and a key repeat functions without requiring
pauses or other time wasting processes.
BRTOS in action
A quick
look at BRTOS in action. Below are 2
screen shots of the Visual Basic Task Monitor while the Clock Demo is running
with DEBUG_TASK enabled.
|

|
|
|
Here,
the clock program is running in Default Display mode.
Immediate
Task list shows the TimedEvent task from the scheduler. This calls the other lower rate tasks.
2Hz the
DispTick routine shows the flashing Colon :.
1Hz - increment
the seconds count (UpDateSeconds) and check the Receive timer RXTmr,
(currently idling as there is no incoming serial data). The SendIdleCtr is a TASK_DEBUG message
reporting the processor load (displayed in the progress bar on the toolbar).
Every
minute we read the RTC and display the full time and date on the display
(DispTimeDate)
|
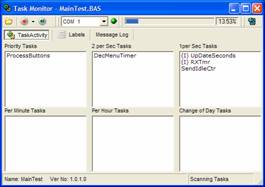
Here, the clock program is in menu mode and we are
adjusting the time.
Immediate Task processes the keypad (ProcessButtons) the
TimedEvent task will also be called after the ProcessButtons task has
completed.
2Hz menu timer is counting down (DecMenuTimer)
The remaining 1Hz tasks are as before.
The DispTimeDate task has been removed while the time
and date are being edited.
|