 |
SLOW MOTION FOR SERVOS
By : Chris Judge
January 2004
INTRODUCTION
This circuit evolved a few months ago when making a model of HMS Cossack a WW2 Destroyer.
It was found that it would be quite good if I could get the Turret servos to run in a kind of Slow-Motion. I also needed 4 outputs (2 for the forward turrets and 2 reversed for the rear turrets).
I spent 3 days trying to figure out a good algorithm for this project until light finally dawned when I realised that all I needed to do was input a value then loop it till the servo position equalled this value - simple. See the fully (some might say over full) commented Proton Plus Basic code.
This project raises the question of servo frame rates, as this circuit certainly does not output at a steady 50Hz, so I did some empirical testing by setting the speed on a Tamiya electric model car, running it round the garden then turning the transmitter off. To my surprise the car just kept the same servo setting even though my garden is far from even. In this application the load on the servos would be far less, and it has proved to be no problem.
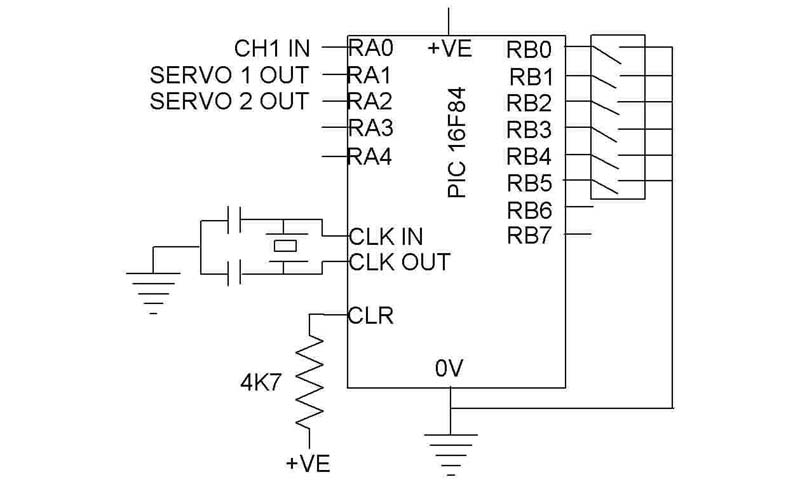
The schematic, such as it is, is shown below. I cannot show a circuit board
photo as it is buried in the bowels of HMS Cossack - sorry.
SCHEMATIC
|
|
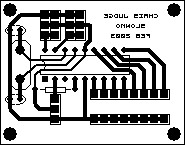
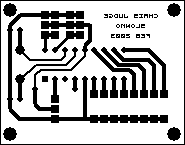
PCB
 |
 |
Download PROTON .Bas file
Chris Judge
January 2004
Please note that this project is published AS IS. No responsibility of the author in any cases can be involved. This project is for learning and entertainment purpose only. No vital application can be connected to it. As this project is published on a free and friendly base for the user site of PROTON , it cannot be used in any condition for business or commercial use without explicit permission of the author.