 |
The
VK5DJ Repeater Controller
by John Drew, 34 Aitken Street, Millicent 5280 ([email protected])
January
2004
|
There are a number of repeater controllers available on the market, most from the USA although from time to time Australian designs have appeared and been used around the country. Dozens of amateurs must have designed units for their local repeater and not published their designs.
The writer has been experimenting with controllers since 1971. The
first foray was the remote control board for VK5RAD (Adelaide) in 1971, and in
1976 came the entire works for VK5RMN (Port Pirie) built on plug in matrix
boards. Later the board etching skills improved for the circuitry of voice
repeater VK5RMG (Mount Gambier) and the digipeater VK5RPM (Millicent). The
controllers had many NE555s, NE567s, TTL and CMOS gates and diode matrices for
callsigns. The 1983 version for VK5RMG had 6 boards in total. The controllers
were reliable but they did take a lot of time and effort to design and build.
They also took up a lot of space.
Microprocessors have been around for a long time and many people
have successfully used them in controller circuits. The NHRC-4 controller from
the USA is a particularly successful design and the South East Radio Group (SERG)
purchased two boards and the essential ICs as a kit and these were assembled and
used to link the Naracoorte and Mount Gambier Repeaters together in 1999. A UHF
link provides the essential communication. They work well but they are
relatively expensive.
When the concept of a gateway to Kingston was suggested at a SERG
meeting the author thought “I can do that” and started playing with the
16F84A and an excellent BASIC compiler from Crownhill Associates (UK). The
language has many of the qualities of Pascal and is exceptionally powerful.
PICBasic Plus requires the declaration of variables in advance and makes strong
use of sub routines rather than string code etc. It has something in common with
the old assembler language but with a very friendly and powerful command set. It
compiles some very tight code for the PICs. Check out the PICBasic forum at www.picbasic.org
if you want more information or want to play with the free LITE version. The
programmer board used is the P16Pro40 Programmer – the author’s kit came
from Oatley Electronics and uses PICALLW software to do the programming. The
latter is free if you stick to the 16F84.
These little PIC Microcontrollers are very powerful. The common 16F84
has flash memory space for 1024 commands (14 bits in length), it has 64 bytes of
electrically erasable data storage (handy for callsigns and timer delays) and 68
bytes of RAM for storing variables. It has an 8-bit bi-directional port and a
5-bit bi-directional port. That’s 13 connections to do clever things with. It
all fits in an 18-pin DIL package. Nifty! That’s enough computer talk, now on
to the controller.
Firstly it was necessary to be sure of the requirements. It had to
be capable of running a traditional repeater with remote control capability,
provide all necessary timers and tone generation, be capable of supporting a
gateway or link and, with increasing interference problems in the spectrum, the
capacity for CTCSS controlled transmit. The ability to change callsign and
timers by remote control was considered desirable. All of this to be achieved
with a minimum of components built on a single board within a small box.
The unit to be described is Version 3. The two previous versions
run the Kingston Gateway and the 70cm Mt Gambier Repeater with 29mHz gateway.
Version 1 did not include a CTCSS or DTMF decode while Version 2 did not include
a low pass filter for the CTCSS. Version 3 represents the gradual evolution of
the controller and tidying of some aspects of the circuit. For example it was
found that it was not necessary to amplify the audio to the microphone inputs,
receivers seem to have plenty of line out audio.
The controller is designed around the 16F84A PIC, a MC145436 IC
for DTMF control, a combination of a CA3140 op amp operating as a second order
low pass filter and a NE567 to detect CTCSS tones while a 4066 CMOS switch
controls audio. A LM7805 provides regulated 5 volts to the ICs that require it.
The choice of a NE567 to decode CTCSS is a practical one as the
author has a number on hand, they are cheap and they work OK. There are a small
number of specially designed CTCSS chips on the market. They are quite expensive
and couldn’t be located in Australia. If a reader is interested in using a
proprietary CTCSS chip then a small outboard circuit could be developed. The
controller board can interface to an external decoder (see jumper JP3 and pin 12
of the external connector). This latter facility was used for the VK5ROH Version
2 board, as a commercial CTCSS decoder was available courtesy of Col VK5DK.
The PIC does all the hard
work including the generation of tones, timing, callsign, interpretation of
remote controls and of course switching the output pins in accordance with
instructions from the receiver mute inputs.
Using protoboard I took myself through the ‘flashing a LED’
testing programs on to the main features of a controller. LEDS and switches grew
in 3 dimensions but the prototype served its purpose and enabled me to build
Version 1, now in use at the Kingston Gateway. I used a Dalo pen to create the
tracks and etched a board using my home made, windscreen wiper agitated, ferric
chloride bath.
Version 2 of the board introduced the CTCSS and the DTMF on board. The
DTMF worked fine but the CTCSS tended to drop in and out with speech. Those of
you familiar with CTCSS will know that the added tone is low in level and
because of the response of receiver audio pass bands all but disappears if you
try to decode it at the top of the volume control. Audio must be taken very
early in the audio circuitry, preferably at or shortly after the discriminator.
Version 2 badly needed a low pass filter to improve performance, hence the
redesign for Version 3.
Working quietly behind the scenes for Versions 2 and 3 was Russell
Lemke VK3ZQB who kindly turned my hand drawn circuits into very nice circuits,
boards and parts lists. The project would not be as successful as it is without
Russell’s skill with a drafting program and photographic production of boards.
Thanks Russell.
Schema
 |
Well how does it work?
The controller provides all control functions required for a
repeater, linked repeater or gateway operation. Typical uses include:
A general repeater controller – duplexed single receiver and single transmitter using a 4-6 cavity system to connect to one antenna. Alternatively separate antenna systems with perhaps a single cavity in TX and RX to reduce desense.
A duplexed repeater with a gateway eg a UHF repeater with a 29mHz gateway
A duplexed 2M repeater linked via UHF to a remote repeater system
A simplex gateway connected to a simplex transceiver that remotely
accesses a repeater system (range extender concept).
Features:
The PIC (a 16F84A) is provided in programmed form according to user requirements. If you want a copy of the source code and/or the compiled code it is available free from VK5DJ for amateur use (see website http://vk5dj.mountgambier.org). Using the supplied hex and EEDATA files constructors can program their own PIC.
Memory
map of the EEDATA
0..41
callsign
42,43,44
passwords in order password1, password2, password3
45
mute direction (0= both active low, 1=rpt high & simp low,
2=rpt
low & simpl high, 3=both active high)
46
callsign delay
47
timeout delay
48..55 timeout
message
56..63
OK message
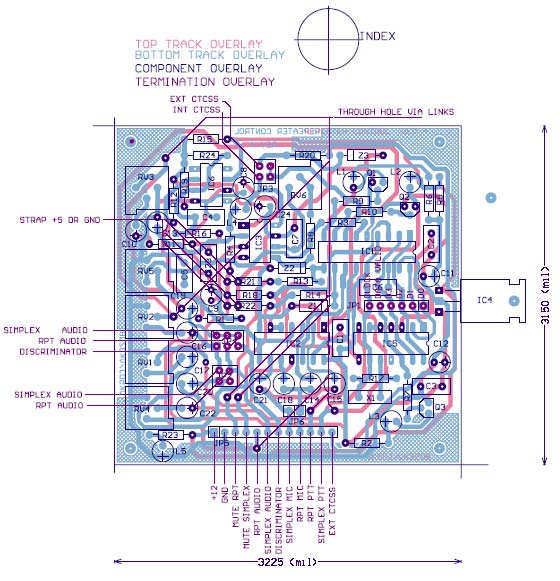
Connection to the real world is through a 12 pin plug mounted on the board
MAIN CONNECTOR
Pin Description
1
+12V in (approx 10mA)
2
DC common ground
3
Mute input from repeater receiver
4
Mute input from gateway or link transceiver
5
Repeater audio in (receiver approx 100mV)
6
Gateway/link audio in (receiver approx 100mV)
7
Discriminator of repeater receiver (for CTCSS)
8
Gateway/link audio out of board (microphone)
9
Repeater audio out of board (microphone)
10
Repeater PTT
11
Simplex PTT
12
External CTCSS detect input to board
Pin 1 is the unregulated supply voltage to the board, nominally +12 volts but
should lie between the limits of 8-14 volts for reliable operation.
Pin 2 is the common ground for power supply, logical inputs and audio lines.
Pin 3 the repeater receiver mute input is generally programmed for 0V when a
signal is received (ie active) and +5 to 15V when the receiver quiet. The line
is clamped on the board with a 5.6V zener. Note that the line is held to either
+supply line or 0V via a 22k resistor mounted on the board to ensure that if a
receiver is not connected the input line has a clear logic level. When
constructing the board the pull up resistor OR the pull down resistor
(R21) is installed depending on the mute state available from the receiver in
use and the appropriate programming of the PIC.
If active high from mute then install a pull down resistor (reprogram
PIC for active high). If active low from mute then install a pull up resistor.
Pin 4 the gateway (or link) transceiver mute input. See notes for pin 3 but
R22.
Pin 5 is the repeater receiver audio in. A capacitor is included on the input
in case this line has superimposed DC. Audio levels should be at least 100mV.
Pot RV2 controls the level. The top of the volume control in the receiver
is an ideal source although some transceivers have an output on a connector for
this purpose. It doesn’t matter if the audio is not muted as the board
provides this function.
Pin 6 is the gateway (or link) receiver audio in. See notes for Pin 5 but pot
RV1 controls level.
Pin 7 is audio from the discriminator of the repeater receiver (or the
receiver being used for CTCSS input). The audio must be taken at this early
point to obtain sufficient CTCSS tone as these low frequencies are both low in
deviation and strongly attenuated in the remainder of the receiver chain.
Commercial CTCSS decoders use the discriminator or access a low pass filter (eg
the Simoco PRF15-20 units). On this board I require separate audio in from the
receivers and this comes in on pins 5 and 6.
Pin 8 is the audio out of the board to the gateway or link microphone. The level is adjustable and depends on the settings of RV2 (received audio) and RV5 (tone outputs for beeps and call sign)
In standard repeater/gateway/link use both pins 8 and 9 are jumpered
together on board (JP6). In the case of an on air cross-linking gateway (eg a
uhf gateway into a remote 2m repeater via a simplex connection) JP6 is
unjumpered.
Pin 9 is the audio out of the board to the main repeater microphone. Level
depends on RV2 and RV5 when the repeater receiver is in use and RV1 and RV5 when
the gateway/link is in use. See Pin 8 notes re JP6 use.
Pin 10 is the repeater PTT. It assumes that 0V is active. The transistor could
sink 20-50mA but a relay should not be switched as there is no protection from
transients. The pin sits at +supply volts.
Pin 11 is the simplex PTT. See notes for pin 10.
Pin 12 is the output of an external CTCSS board. The pin expects an active high (5 to 15 volts). This is zener protected on board to 5.1V. Jumper JP3 provides for either external CTCSS or internal CTCSS. If the internal CTCSS is not required do not install parts for IC3 (NE567 tone decoder) and IC6 (CA3140 op amp low pass filter).
Mute inputs are available at pins 3 and 4 of the main connector.
Repeater input overrides the gateway input. On lowering of the mute (received
signal) the timer begins. On raising of both mute pins the timer is reset.
On timeout the board sends ‘TO’ and shuts down the PTT and
audio of both transmitters. When both mutes are high the transmitter provides a
tail and sends another ‘TO’. The device is again ready for use.
The mutes from the primary and secondary receivers are applied to Ports
B.4 and B.5 of the microcontroller. The voltage is clamped to no more than 5
volts by the zeners to protect the input of the 16F84 from excessive voltage.
A zero on a mute indicates that a signal is being received. The
mutes are continually polled by the microcontroller at approximately 20msec
intervals. Once a mute is open on Port B4 or B.5, the appropriate PTT pin is
lowered on Port B.3 or B.2 and at the same time the appropriate audio is
switched on through Port B.7 or B.6. The timeout timer starts counting.
The duplex repeater always has priority.
When a mute goes high (receiver mute closes) the 16F84 checks to
see if a callsign is due, if so it sends a callsign, if not it sends a tail and
if appropriate a beep (or two or three – see later). The timeout timer resets
to zero. The callsign timer resets if a callsign was sent otherwise it keeps
counting. The delays for the callsign and the timeout timer may be remotely
changed.
If a mute stays on for a longer period than allowed by the timeout
value the audio is shut down, a ‘TO’ is sent in Morse code (Port A.4 goes
high to turn on the audio switch), then the PTT is taken high (Port B.3 and Port
B.2) and everything shuts down. When the mute finally goes high this frees the
system and a further ‘TO’ is sent in Morse and the repeater/gateway/link is
again available.
The DTMF controller system works in the following way.
A 145436-decoder chip has an oscillator running at 3.58mHz. This
frequency is coupled to the PIC and so provides clock signals to both the
decoder and the chip. DTMF tones are applied to the input pin of the chip
through JP2. The jumper on JP2 determines which receiver passes on the DTMF
tones. On receiving a valid tone the output pins are sensed by the PIC through
input ports RA0,1,2,3.
A three-digit address code is sent by DTMF and received on a receiver. For the sake of this document the address sequence will be 987. The address is followed by the control byte and possibly some data.
Inhibits the main transmitter.Inhibits the gateway/link.
Cancels the main timer (useful for the WIA broadcast).
Requires CTCSS input to enable main transmitter (may be programmed to require CTCSS for gateway to meet limitations of some licences.).
Changes callsign (see later for notes).
Change callsign delay (units about 18 secs, HEX 10 gives about 5 mins).
Change timeout delay (units about 18 secs, HEX 0A but use HEX 0B - see later note re 0A)
Gives about 3 mins. Resets controls 1,2,3,4 to default, that is, timer active, gateway on, main TX on, no CTCSS required for main TX)
Example: If the address was 987 then a control sequence of DTMF
‘9873’ will inhibit the main timer. When the carrier is dropped an ‘OK’
is sent in Morse if the command was successful. The tail will now have two
beeps.
A DTMF sequence of 9878 will re-enable the timer.
Due to the nature of a DTMF touch tone pad the numerals sent by
the pad do not quite align with their value (To complicate things I ran out of
ports on the PIC and therefore couldn’t decode the received tone enable pin,
this limited access to 4 bits of data). I needed a zero more than I needed a 10
(HEX A) so I have internally translated the keyboard 0 (actually a 10) to a real
0 and thereby lost HEX A. Because of this the other digits are displaced so you
need to use the translation table (Fig 1). This means that when you need the HEX
character in column 3 you must push the button in column 1. Messy, but you
won’t need to use remote changes very often. In fact after setting up you may
never need to use them again.
|
LABEL ON DTMF PAD |
NUMBER SENT |
NUMBER received by software
|
|
1 |
Binary 0001 Decimal
1 |
Hex 1 |
|
2 |
Binary 0010 Decimal
2 |
Hex 2 |
|
3 |
Binary 0011 Decimal
3 |
Hex 3 |
|
4 |
Binary 0100 Decimal
4 |
Hex 4 |
|
5 |
Binary 0101 Decimal
5 |
Hex 5 |
|
6 |
Binary 0110 Decimal
6 |
Hex 6 |
|
7 |
Binary 0111 Decimal
7 |
Hex 7 |
|
8 |
Binary 1000 Decimal
8 |
Hex 8 |
|
9 |
Binary 1001 Decimal
9 |
Hex 9 |
|
0 |
Binary 1010 Decimal
10 |
Hex 0 |
|
* |
Binary 1011 Decimal
11 |
Hex B |
|
# |
Binary 1100 Decimal
12 |
Hex C |
|
A |
Binary 1101 Decimal
13 |
Hex D |
|
B |
Binary 1110 Decimal
14 |
Hex E |
|
C |
Binary 1111 Decimal
15 |
Hex F |
|
D |
Binary 0000 Decimal
0 |
Unused |
Fig 1
If you only have a 12 digit DTMF keyboard you should be able to remote
control quite satisfactorily. The author suggests using either 1# or 20 for the
value of the dah depending on how you like the sound of dahs. A 1*
meets the dah=3 dits definition perfectly but most amateurs prefer
a dah a little longer than the recommended 3 times the length of a dit.
You may think otherwise.
Changing the callsign.
This is FUN! The PIC program works by reading the delays you enter in
EEPROM memory via command 5. (eg send address 987 and the 5)
Dit
=
HEX 04
Dah =
HEX 0E
<EOC>
=
HEX 50
end of character indicator
<EOM>
=
HEX 55. end of message
indicator
These timings may be varied according to the following rules:
1)
a dit and a dah must be less than HEX 30
2)
an <EOC> must be more than HEX 30.
3)
An EOM MUST equal 55.
4)
Each HEX unit of a dit and dah equals approximately
10msecs of tone
04 04 04 0E 50
0E 04 0E 50
04 04 04 04 04 50
04 50
0E 55
dit
dit
dit
dah <EOC >
dah dit
dah <EOC>
dit
dit
dit
dit
dit <EOC>
dit <EOC>
dah <EOM>
To send this to the controller remember to retranslate according to
table above – note that a HEX E is sent by hitting the B key.
98750404040B500B040B5004040404045004500B55 sends VK5ET
Then drop your transmission. An ‘OK’ signifies provisional success, although if you made a mistake with numbers you may have errors in the callsign. Wait and find out.
Note the address leads the routine. This routine is a great test of your ability to send a long string of digits and of your keyboard not to bounce! Fortunately you don’t have to do this often. The callsign must not exceed 47 bytes or you will corrupt other information stored in the data area (the other messages and the timer variables). This is unlikely to be a problem as the above example only uses 19 bytes and even VK5RBB/M3 would only use 44 and I can’t think of a longer legitimate callsign in VK.
You can experiment with the numbers but remember the rules cited
above.
The general principle is to send the address followed by a 6 then two
characters defining the HEX delay.
Each unit is about 18 secs so if you want 10 minutes:
10* 60 / 18 = 33 decimal or HEX 21. You will need to send a 2 then a 1.
Your control sequence is 987621
Another example, this time for 15 minutes:
15*60/18= 50 decimal or HEX 32
Control sequence is 987632
If your calculation gives say HEX 1A, then you can send the
‘1’ but not the ‘A’ (see table), you will settle for sending 19 or
perhaps 1*
I have used the same rules and strategy as ‘changing the callsign
interval’, except that the command is 7 instead of 6.
Eg a 3 minute timeout is calculated like this:
3*60/18= 10 or HEX 0A.
HEX A is not available on the DTMF pad so use * which sends a HEX B (see
table) and your delay is about 18 secs longer! No big deal.
Control sequence is 98770*
The polarity of the mutes is dependent on the wiring of R21, R22 (see
above) and the value of the byte at address HEX 2D in the EEDATA. The EEDATA.EEP
file needs to be altered to suit and PICALLW has edit facilities.
Values for the byte at address HEX 2D are:
0= both mutes active low
1= repeater mute active high, simplex mute active low
2= repeater mute active low, simplex mute active high
3= both mutes active high
Tail operation
A tail is provided once both mutes are inactive. This is set at approximately ½ second. As an encouragement for people to wait between transmissions no audio from a receiver is fed through for this time (1/2 sec) even if a mute opens. Audio is fed through during callsigns.
A beep is provided under certain control circumstances.
A tail (either ½ sec or callsign tail) is always generated on the
repeater TX.
Providing the gateway is not inhibited, a tail is generated on the
gateway TX if the last mute opening was generated by a CTCSS enabled signal on
the repeater receiver, or if the last transmission was on the gateway receiver.
Call signs are sent every ten minutes (or as changed by remote control)
at the end of the over. If a call is not due at the end of the last transmission
of a contact one call sign will be sent at the end of the timing period. The
repeater will then go silent until the next mute opening. A call will be
generated at the end of this mute opening if 10 minutes has expired since the
last.
The values on the circuit suit reception of a 118.8 Hz CTCSS signal.
These low frequency signals are attenuated by tailoring of the receiver audio,
so the board must take its audio from the discriminator circuit or early in the
audio chain before tailoring.
Changing C7 or R8 changes the CTCSS frequency beyond the range
achievable with control RV6. Lower values increase the frequency. LED L4 lights
when a correct tone is received. L4 is a useful tune indicator when adjusting
RV6.
For the program written for repeater/gateway operation, the
gateway is enabled if the user sends a CTCSS signal. Without the CTCSS the
repeater function is normal. This meets a licensing requirement to ‘lock
out’ people without the required endorsements for eg 29mHz operation of a
gateway.
Gateway operation is, in effect, in parallel with normal repeater
operation providing the CTCSS is sent.
The CTCSS function can be required for normal repeater access.
This may be needed where interference from LIPDs is a problem. See function 4 in
remote controls.
See Jumper section for orientation of the board for this description.
The CTCSS detect LED is in the North East of the board and lights
when there is a valid CTCSS signal received.
The repeater and simplex PTT LEDs are together in the South East
corner. The repeater LED is the northernmost of the pair. The simplex PTT LED is
the southernmost of the two. They light when PTT is low (i.e. active).
The DTMF valid LED is at the bottom (South West) corner of the board by
itself and lights when a valid tone pair is received.
The power on LED is in the North West corner of the board.
Constructors may choose to mount the LEDs on the front panel of
the box.
Pin 1 is the output for DTMF decoder (data bit 0) –
high if bin 0001 rcvd (see table later but pin 1 is nearest the 7805
voltage regulator)
Pin 2 is the output for DTMF decoder (data bit 1) –
high if bin 0010 rcvd
Pin 3 is the output for DTMF decoder (data bit 2) –
high if bin 0100 rcvd
Pin 4 is the output for DTMF decoder (data bit 3) –
high if bin 1000 rcvd
Pin 5 is data valid and goes high for a valid tone detect
Pin 6 is the output of the Xtal oscillator and should be 3.579mHz
With the board held with components up and the main connector on the
left (west) and the voltage regulator at the bottom (south), the trim pot for
the CTCSS is to the east. From an imaginary point in the centre of the board the
angles locate each jumper.
H means the jumper lies east/west, V means the jumper lies
north/south.
Position number 1 is always either the northernmost or the
easternmost position.
Position number 2 is the next to the south or west and so on.
JP1 are test points see above (190 degrees) with pin 1 nearest the 7805
JP2 controls the source of the audio for the DTMF tones. (300 degrees)
JP3 internal or external CTCSS input to 16F84A (75 degrees)
JP4 audio source for CTCSS (320 degrees)
JP5 main interconnector – see above (270 degrees)
JP6 join microphone points (270
degrees)
 |
 |
 |
 |
Make the following decisions:
Mount the socket for the 16F84 (strongly recommended, you might want an updated program one day).
Note notch is to the regulator end. Install the 7 jumpers (from top to bottom of board)
Install JP1-6 Install all the resistors but note positions of R21,R22.
Solder to upper board and bottom trace where jumpers are required.
Install all the capacitors. (solder top and bottom where traces exist.)Install voltage regulator LM7805.Either solder LEDs to board or attach wires for LEDs to be mounted on front panel at a later date.
I suggest at least dangling the ‘power on’ LED temporarily on its wires for the next check.Apply +12V to board and ensure that +5V is available in appropriate spots eg pin 4,14 of PIC.
Remove voltage and solder remaining solid-state devices – leave PIC out of socket for the moment.
Install in box and wire the board to the DB25 on the rear of the box. I used pins 1-12 to maintain the integrity of the numbering system.
Wire the LEDs located on the front panel and a power switch if you wish.
I didn’t use a switch, preferring the control logic to boot up as soon as
the rigs have power to avoid unpredictable states in the rigs.
TESTING
The following assumes active low situations. If not, you will no doubt
work out your own testing procedure by inverting the logic. Pin numbers refer to
either the DB25 or JP5 if you followed my advice on connections.
Temporarily connect the following:
·
Switch R – SPST between pin 3 and earth (pin 2)
·
Switch S – SPST between pin 4 and earth (pin 2)
·
A SPDT switch and a headphone socket to listen to either pin 8 or pin 9
(earth is common)
·
A SPDT switch and a socket to enable audio either from a receiver or an
audio generator to direct audio to either pin 5 or pin 6.
·
The capacity to measure the voltages at pins 10 and 11 (the PTT outputs)
·
Connect jumpers – JP2, 1&2
JP4, 1&2
JP3, 1&2
On power up, the controller is set with gateway off.
Test logic functions:
Headphone listening to repeater mike – pin 9 (Switch R)
RV5 half way
LED2 lights.
Open switch R
LED2 stays on for ½ sec (or possibly longer if it decides now is a good time for a callsign).
Repeat opening and closing R to see if it matches your
expectation.
Close switch R and leave it on.
After about 5 minutes you should hear
‘TO’ in Morse and LED2 should go out when the TO is finished.
Open switch R and you should again hear ‘TO’ and LED2 lights as ‘TO’ is sent.
The system will again respond to opening and closing of switch
R.
Wait a little longer and after a Closure/opening of switch R a callsign
should be generated. LED2 again indicates the PTT state for the repeater.
Use a multimeter to see that pin 9 is going low when the LED2 lights.
At
other times it should be at about 12V.
Connect a DTMF generator (or a receiver) to the appropriate input (pin 5
with the test jumpers in place). Send a tone, LED 3 should light. If not adjust
RV4.
With no input check the voltage on pins 1,2,3,4 of JP1. These should be
at 0V. Send a DTMF C and check that all pins 1,2,3,4 are high.
If logic and DTMF decode don’t seem to work then check with a CRO that
there is a 3.58mHz clock on pin 6 of JP1
With switch R closed, send the address and a 1 (eg 9871). Open switch R,
hear an OK in the headphones, and then note that LED2 no longer responds to
switch R (the TX has been inhibited.)
With switch R closed, send digits 9878 (password+8). Open switch R and
hear the OK and LED2 again follows switch R.
Test CTCSS if installed
Feed a low level CTCSS tone into the appropriate pin (for the test setup
use pin 5 and bridge JP4 bridge H1). I suggest 118.8hz. Adjust both RV6 (freq
determination) and level RV3 for lighting of L4. Reduce level and retune RV6 for
LED4 to find the most accurate setting of RV6. The level potentiometer will need
to be reset when the receivers are finally connected. Note that I strongly
recommend that you connect as close as possible to the receiver discriminator as
receiver audio chains attenuate CTCSS tones.
The 567 tend to drop out when there is a whistle or loud speech.
The program allows for this and has a hang facility built in. As long as the LED
flashes once every couple of seconds the system will work.
Audio switching:
With different audio provided to the two receiver output pins, switch R
and switch S alternately note the different combinations of audio.
Potentiometers RV1 (simplex TX audio) and RV2 (repeater TX audio) adjust levels.
FINAL TEST
Connect to your transmitters and receivers. All levels will need to be
reset. Connect jumpers as appropriate. Generally JP6 is bridged EXCEPT when you
use the board as a range extender or simple gateway. Check general operation. It
is at this time that some nice instruments help. Otherwise do what I do, get a
group together to monitor your experiments as you adjust levels, flicking to and
fro from the direct path to get an idea of similar levels – crude but it
works.
The production board will fit quite nicely in a small instrument case
110*140*35mm (Dick Smith H2512 - $9.75). A DB25 socket mounted on the rear is a
simple way of achieving connectivity to the transceivers.
See Readme.txt
Note that in the parts overlay and circuit diagram LED L5 is the wrong
polarity. It will need to be inverted. In addition, the photographs of the
populated board do not show R24 (3M3). A last minute change of circuit for the
low pass filter meant that R24 was installed under the board for the prototype
board in the photos. The parts layout and board patterns show R24 (3M3) in its
new position near IC6. Don’t let my photos of the board confuse you with
regard to R24. Also note that the overlays have labels to JP2 and JP4 reversed
for repeater and simplex audios.
I would like to thank
Russell VK3ZQB for drawing the circuit so well, the development of the parts
lists and layout, and the preparation of the board. Without him the board would
be hand drawn, twice the size and have many links. The support of Michael Carra
in building a controller and discovering errors in the documentation is also
appreciated. Thanks Russell and Michael.
Have fun, I’m prepared to help people with specific needs.
![]()
John Drew VK5DJ
(Last
revision